
From Route Instructions to Landmark Graphs
2020 — Principal Investigator
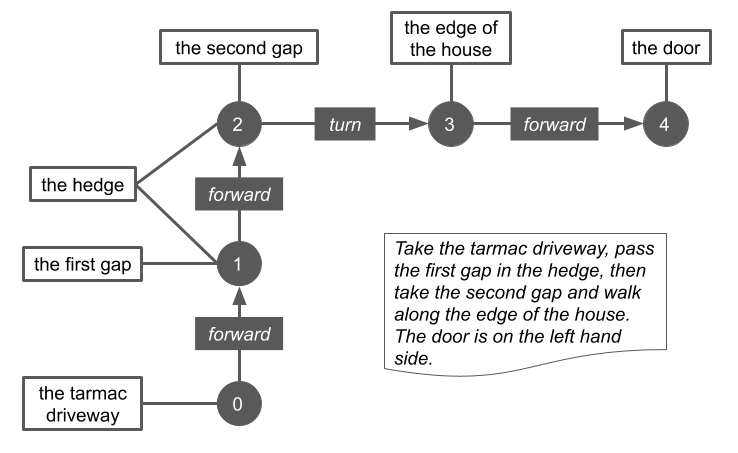
Mapping technologies have traditionally relied on moving sensors through space along predefined paths (e.g., driving a car equipped with cameras and lidar along a road), but this approach has limited utility in emergencies (when predefined paths may have changed without warning), in parts of the developing world where infrastructure is not well-developed, or in the last mile / last meter context, where couriers must find unusual entrances or navigate interior spaces. In all such cases, people navigate by constructing a mental map using landmarks.
This projects sought to bridge the gap between mapping technologies and people’s mental maps by automatically constructing graphical representations of landmarks and how they relate in space from natural language route instructions. We developed a neural model (based on a bidirectional LSTM using the encoder-decoder approach) to repeatedly parse route instructions, iteratively attending to different portions of the text to predict an action or world state (landmark cue) that could be combined into a final graphical representation.
Additional details can be found in the paper.